GPS Positioning
- Parisa Falakdin

- Nov 2, 2017
- 2 min read
Introduction:
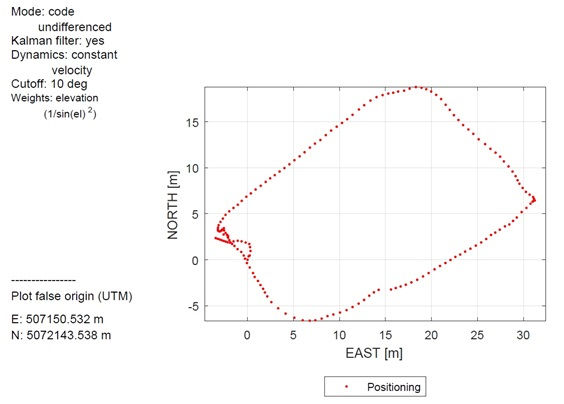
First we upload some data from a basketball field near esselunga superstore, in Como, Italy. We are going to use goGPS software in order to calculate the position of the border of the basketball field by using different methods. A rover receiver is considered with an almost constant velocity. We also have a master receiver which has a known location by distance to the rover. We should know the distance between master receiver and the rover. In each method we are trying to know the position of the rover for the next epochs by considering the information from the previous epochs.

Kalman Filter:
KALMAN filter can predict the trajectory of a moving system in real time by updating the estimate at the previous epoch and exploiting new observations. KALMAN filter can be very precise. We can change the precision for KALMAN filter at goGPS software. Lower values have more precision. If we plot the residuals, the error is more or less 30 cm for code observations and 3 mm for phase observations which indicate how much we can trust on these observations.

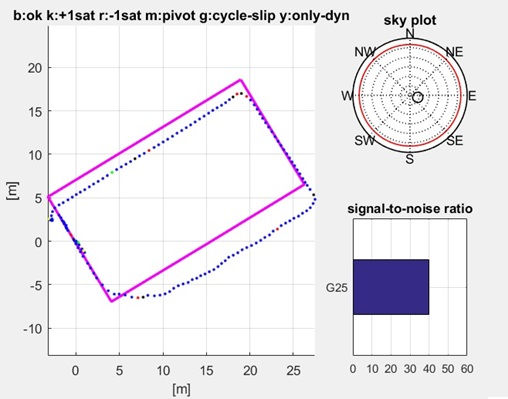
Double Difference Method (DD):
Double difference method can provide a high accuracy and it can reduce some errors due to modeling. In this method we use relative positioning instead of the absolute one. In this method we have two receivers and the distance between them as a baseline. A reference receiver uses at a known location and the position of the other receiver can be derived consequently. The disadvantage in this method is that only relative position can be estimated. Moreover, the receiver clock bias is still unknown, and very unpredictable.
Methodology:
1. Code Undifferenced


2. Code Double Difference

3. Code and Phase Double Difference



Comments